
What’s the basis? When will it be ready? And what will it look like?
The year is 2010, man is embarking on a second odyssey in space (albeit to determine what went wrong the first time), those still on earth live in cloud cities, drive or are driven in flying cars to their high-tech jobs, comfortable in the knowledge that when they return home their every wish will be granted by their doting and never tiring personal robot butler.
A consistent set-up in science fiction, films, shows, books and even adverts of the 1940’s - 60’s were full of references to these devoted, humanoid mechanical marvels. The Jetsons had Rosie the robot maid and although being set 100 years into the future from its release in 1962 (Scoop e-newsletter, 2003) Rosie was said to be 45 years old i.e. created in 2017. In I Sing the Body Electric! (1969), a short story by Ray Bradbury, children are bought a robot grandmother to look after and even love them. Advertisers used them to show how their ‘smart’ products were just a step away from the future such as the short film “Leave it to Roll-Oh” (1940).
But like so many throughout the world, I still haven’t received delivery of mine yet and I’m beginning to think that these writers and Tomorrow’s World have lied to us all. Another concerned individual writes “Their arrival in the average home is regularly and wrongly predicted, and short of a few automatic machines that vacuum the carpet or mow the lawn by a process of trial and error, there's not many on the market.” And also agrees that “The Holy Grail, for some reason, is to develop a robot that's as humanlike as possible” (The Independent, 2008).
The idea of robot butlers has obviously been around for a while, but when can expect delivery of my own? And at what stage of completion is it now?
Perhaps one of the most advanced and certainly famous, real, humanoid robots is Honda’s ASIMO. ASIMO stands for, Advanced Step in Innovative Mobility, and is the latest generation in a rich history of robots from the ever diversifying Japanese car manufacturer. Honda’s foray into robotics started with the E0 in 1986, merely a set of legs the E0’s goal was simply to walk forwards; however its top speed was a frustrating step every 5 seconds. Between 1987 and 1991, with E1 - E3, the legs managed the dizzying, in comparison, speed of 3km/h however were still just legs performing a pre-specified set of movements. 1991 – 1993 saw a huge step forwards, in a very literal way, the E4 – E6 robots were capable of “Autonomous control of balancing when going up and down the stairs or slopes or stepping over an obstacle” (Honda Worldwide, 2010) in other words were able to dynamically control their actions as their environment changed and also as they changed their environment e.g. by moving. ASIMO’s most recent ancestors; P1, P2 and P3 further evolved during 1993 - 1997 including a set of arms that could “turn external electrical and computer switches on and off, grab doorknobs, and pick up and carry things”, starting to resemble a robot that can bring a fresh pot of coffee upstairs in the morning, the first of our robot butler’s daily chores.

From that point on ASIMO has been Honda’s golden child, going on tours and performing breathtaking feats such as walking across floors and up stairs, shaking hands with dignitaries and even the occasional interpretive dance piece. While these ‘feats’ don’t sound too daring, ASIMO has been known to take some dramatic and possibly costly tumbles at some very public and important Honda promotional events. However, the affectionately named “Child Astronaut” because of its appearance, does have a array of impressive skills, mobility issues aside, including: complex arm and hand movements; movement recognition using its head mounted stereo cameras, enabling it to greet approaching people or follow them somewhere; posture recognition, “ASIMO can interpret the positioning and movement of a hand, recognizing postures and gestures”, this allows you to simply point when your butler needs to go and tidy something up or have a friendly response when you wave goodbye in the morning; Environment recognition, this allows ASIMO to avoid bumping into moving obstacles i.e. humans that come into its field of vision and also static objects and plans routes around them accordingly; Sound recognition, ASIMO can react to hearing its name called or being told to do something, it can also “recognize sudden, unusual sounds, such as that of a falling object or a collision, and face in that direction”, enabling our robotic domestic attendant to be first on the scene when that inevitable glass is dropped; lastly ASIMO is able to recognise faces, a handy feature so that he doesn’t offer those burgling your home a cup of tea or ‘help carrying that’, but more likely to be able to welcome you home and provide you with any messages. ASIMO seems to have most of the qualities you would hope for from your new butler, however there are some large drawbacks: firstly is the stability issue, it is highly likely that if you have seen videos of ASIMO, you have seen at least one video of ASIMO falling over, followed by four or five Honda technicians running over with a screen to hide the ex-robot. These seemingly frequent falls could end up costing a small fortune “William de Braekeleer from Honda has been charged with looking after ASIMO since 2003. A company edict prohibits him from even guessing how many millions ASIMO cost to develop - he just leans on a wall for support when asked” (Times Online, 2009). The second issue is almost certainly the killer, ASIMO is not autonomous, each task is sent to ASIMO by an operator. Most of ASIMO’s clever features have to be triggered i.e. follow the next person you see, plan a route from A to B. All of his on-stage walking and ‘running’, both feet are in the air for 0.08 seconds, are in fact controlled directly by the operator “ASIMO is controlled by a laptop computer or by a portable computer controller unit through a wireless network system.” Which makes his falls all the more worrying.
Not to be outdone by their compatriots
The choice of shape for the robot butler is an interesting one. In science fiction movies and shows using live-action i.e. real people as opposed to animation, it is certainly easier to simply put an actor inside a robot suit that is shaped like a human. But why do science fiction writers, animators and those not constrained by physics, current technology and body parts choose humanoid robots?
There are benefits to human and robot alike, both physically and emotionally, for using humanoid robot, whether these were considered at the time or using a human form was just more obvious and perhaps simpler than inventing a new shape is a subject for debate.
The first benefit is social interaction, between a human and a robot, researcher David Hanson says “The human face is perhaps the most natural paradigm for us to interact with.” (msnbc, 2004) This theory can be extended to the rest of the body, suggesting that by having a humanoid form, these robots would make humans feel more comfortable communicating with them. However some researchers think that care needs to be taken not to make the robots too human-like, Japanese roboticist Masahiro Mori’s ‘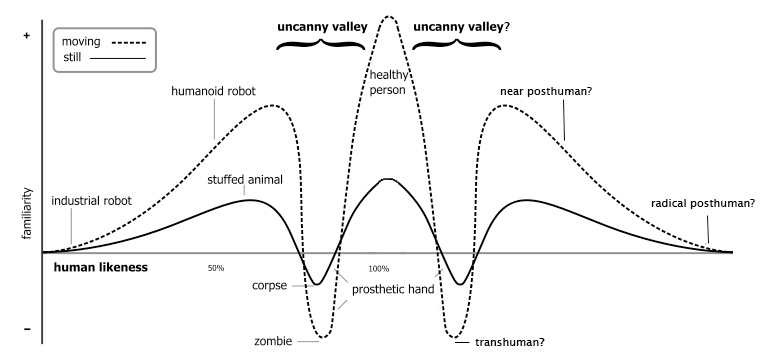
Another benefit is that the robots have to live and work in what is a ‘human world’ i.e. everything around us is designed to be used by humans. Using a humanoid shape means that the robots will be able to interact with and use, theoretically, depending on dexterity and software, anything that a human can use. Again Honda seem to have taken this into account, even though ASIMO is shorter than the average adult human “This size allows the robot to operate light switches and door knobs, and work at tables and work benches.” (Honda Worldwide, 2010).
However the drawbacks mean that the task of creating a humanoid robot butler is a challenging one. Mobility, as indicated above, is a key issue, making a robot walk upright on two legs is not a trivial task with constant adjustments having to be made as the centre of gravity shifts from side to side as each step is taken. All of this adjustment and planning leads to problems in other areas such as processing and electrical power. An autonomous robot would not be able to co-exist with humans if constantly plugged in to an electrical socket, therefore batteries must be used. This in turn adds to the weight and instability of the robot, which can cause more work for the motors to do, more adjustments to be made, requiring more processing, all of which require power from the batteries, this cycle could continue, therefore trade-off’s between battery life and complexity of tasks need to be made. Even giving the robot wheels, or a wheel in the case of Rosie from the Jetsons, introduces its own challenges of balance and the scourge of all early Daleks, stairs. Another huge challenge to creating robots able to interact with human’s objects and tools is the dexterity and levels of intelligence needed to control that interaction. Whilst, relatively, simple tasks such as carrying trays of drinks, and shaking someone’s hand can be and have been achieved, these are the result of pre-programmed routines that the robot simple runs through: See outstretched human hand, move robot’s hand in that general direction, wait X time and hope the human has grasped robot’s hand, move arm up and down 4 times, end routine. However picturing how to get a robot to brush someone’s hair, crack an egg, plug-in, turn on and push around a vacuum cleaner or fill up an irregular shaped glass to the required level, pick it up without breaking it, and carrying it to the human master without spilling anything, in the way a human does without thinking about it, is much more difficult.
Perhaps the last sentence is an indicator as why we haven’t got our robot butlers yet ‘in the way a human does’. Maybe our butler needs to move away from the science fiction version of a humanoid and take a different direction.
One option would be to have a completely distributed butler, or what would be closer to equate with a many ‘household staff’, where each member of staff has their own specific duty. This would mean that instead of one butler pushing around a vacuum cleaner and then later making a pot of coffee and bringing you a cup, an automatic cleaner would travel around vacuuming while a dedicated coffee maker ground, filtered and fully prepared the morning’s cup, although this may mean having the arduous task of having to go and collect the cup yourself from the kitchen. These two examples are already a reality with the Roomba automatic vacuum cleaner, from iRobot and many ‘Bean to cup’ coffee machines. One thing that could be lacking with the ‘distributed house staff’ is a sense of order and control. Possibly that control is also not that far away, with networked home appliances, that can be controlled and co-ordinated through a home network and even over the internet. Toshiba have entered the market and “Three models of networked home electric appliances have been launched, a refrigerator, microwave oven, and home laundry. The appliances have built-in self-monitoring capabilities that will notify a repair company if a problem should arise. By means of Bluetooth, the user is connected via a wireless access point to the Toshiba Web service which controls home electric appliances” (The Centre for Sustainable Design) The user is given meal ideas depending on what is in the fridge, which will also remind you, or order them itself, if certain items are running low, the microwave oven is pre-programmed with cooking methods depending on what meal suggestion is chosen, all while the washing machine happily chugs away cleaning your laundry, although the responsibility of putting clothes in and getting them out when instructed still lies with a human. There are some people, however, who are simply not physically able to retrieve their own clothes, how could this ‘House Staff’ approach work for them? There are a few possibilities: In Japan “Robots are becoming active in the medical and welfare fields due to the labor shortage resulting from the increase in the number of elderly people and the falling birthrate.” (The
Perhaps then we need to compromise, a humanoid robot that has all the benefits of robot to human interaction, but with none of the challenges of robot to human-tools interaction. Instead of a robot living in a human world, we live in, as scary as it sounds, a robot world, where interaction is maximised between the robot staff (through specialised connectors for communication, carrying, pouring, opening etc.) and not between a human and the robot staff and objects. The humanoid robot can then act as an ambassador for the robot staff, taking our instructions in a way comfortable for humans and then relaying this to the rest of the robot staff, who then carry out the instructions until the robot ambassador can collect the results (if applicable) using it’s specialised connectors and bring them to its master. This vision of a robot house is not too large a leap from what is currently available. Possibly by using wireless household networks, a humanoid-ish robot with wheels, such as the “RIDC-01 an autonomous robotic maid that can find its way around your house” (Technovelgy.com, 2006), and a stair lift, it is easily imaginable (current cost of all of these components aside).
Science fiction has created the dream of our butler, and possibly has ill-advised us as to exactly the best way that it should work. One question that lingers throughout is whether it is the robots that are not ready yet to work for us, or is it us humans who are not ready to let robots into our lives?
In 2002 Jaclynn Bumback a research analyst with In-Stat/MDR reported that “You'll see mass-market smart home networks five years down the road” (PCMag.com, 2002) however, 8 years on, after the huge buzz at the time, we still seem no closer to mass-market intelligent, interconnected, instruments. In fact when searching for intelligent networked devices one finds that most of the products are now discontinued and more alarmingly, some of the big players, such as Beyond, with iCEBOX now cease to exist, their websites demoted to domain placeholders and guided search pages. Were the products just not good enough, or did humans just find it easier to run their lives themselves?
One amusing instance may provide some insight into the situation: security vulnerabilities have been identified in networked Jura F90 coffee makers, allowing access by unauthorised people over the internet, leaving the network vulnerable and coffee maker an expensive paperweight, therefore called a DoC or “denial-of-coffee attack” (boingboing, 2008).
No comments:
Post a Comment